Detailed schematic
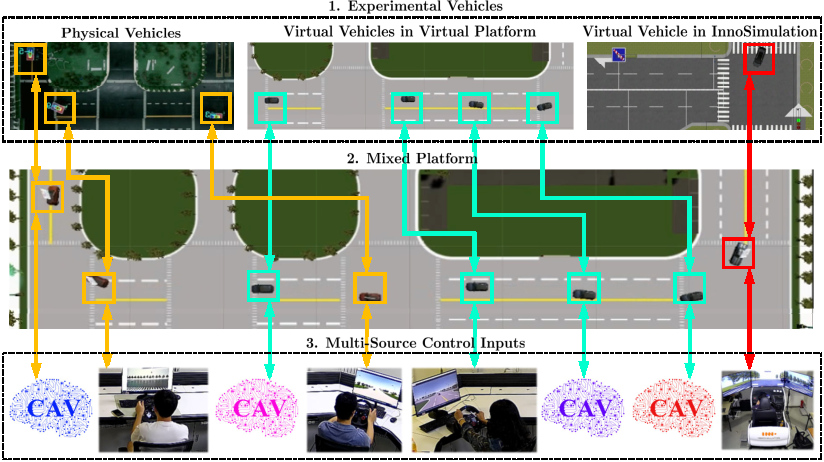
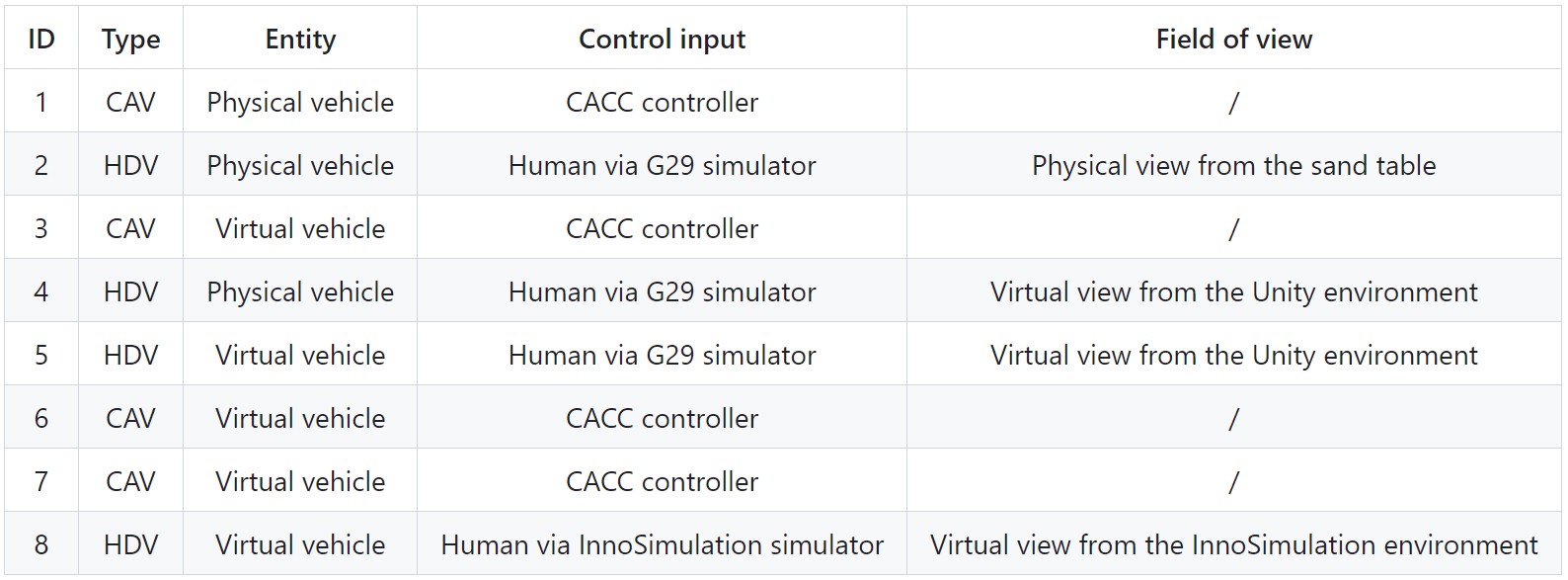
In the emerging mixed traffic environments, Connected and Autonomous Vehicles (CAVs) have to interact with multiple human-driven vehicles (HDVs). This paper presents MSH-MCCT (Multi-Source Human-in-the-Loop Mixed Cloud Control Testbed), a novel CAV testing platform designed to capture the complex multi-interactivity among various CAVs and HDVs. This platform is developed based on a notion of Mixed Digital Twin (mixedDT), which integrates Mixed Reality into the Digital Twin framework, and thus allows physical entities to coexist and interact with virtual entities via their respective digital counterparts. Under the mixedDT framework, MSH-MCCT consists of physical, virtual, and mixed platforms, and multi-source control input. Bridged by the mixed platform, human drivers and CAV algorithms could control both physical and virtual vehicles. This enables cooperation between physical and virtual CAVs and HDVs within an integrated environment, greatly enhancing the experimental flexibility and scalability. Experiments on vehicle platooning in mixed traffic validate the capability of MSH-MCCT to conduct CAV testing while integrating multi-source real human drivers through diverse-fidelity driving simulators.